Automated driving with vehicle-road cooperation
 Trial Site
Trial Site
Our research was conducted on Chongming Smart Island in Shanghai, where we utilized the concept of Vehicle to Everything (V2X) communication for autonomous vehicle experiments. This enables vehicles to receive real-time road and perceptual information, which can help improve road safety, increase operational efficiency, and reduce traffic accidents. The study mainly focuses on various aspects of vehicle-road coordination for autonomous driving, conducting experiments and testing its feasibility.
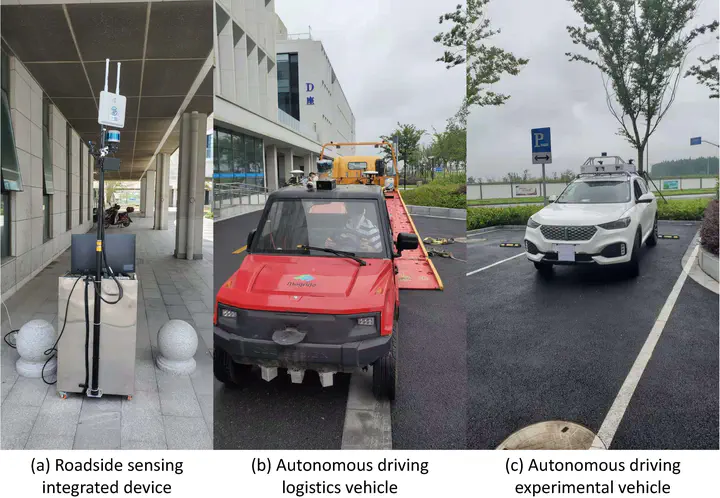
Figure (a) shows our roadside perception integration device. This equipment can be used to collect environmental perception information from roadside, which can improve the safety and intelligence of autonomous vehicles as it provides real-time data on vehicles and pedestrians within a 100-meter range to assist in vehicle perception for surrounding vehicles and pedestrians.
Figure (b) describes the autonomous logistics vehicles we used in our experiments. These vehicles can be used for human or cargo transportation within the park, and can operate without human intervention to improve transportation efficiency.
Figure (c) displays the autonomous driving test vehicle. This vehicle is equipped with various advanced sensors such as lidar, millimeter-wave, and cameras that enable automatic driving through its own sensors or assisted by roadside sensing devices via V2X devices mounted on the roof.
Our research aims to develop and improve current autonomous vehicle technology while promoting its widespread adoption. We hope to contribute to the development of autonomous driving technology while promoting improvements in road safety and transportation efficiency.
Yang Liu
Ph.D. Candidate
I am a Ph.D. student at Fudan University, majoring in computer science, with research interests in signal processing and computer vision.